
Nodoka Shibasaki
About Me
I am a fourth-year Electrical and Computer Engineering student at Northeastern University. Under the supervision of Professor Taskin Padir, I am currently researching manipulation and autonomy.
Until December, I am researching robot manipulation for warehouse applications at the Innovation Lab at Amazon Robotics. Additionally, I am contributing to the open source SONiC Platform Driver Development Kit under the close guidance of mentors at the Linux Foundation.
In the past, I gained valuable industry research experience as a Research Intern at OMRON SINIC X in Tokyo where I researched contact-rich manipulation for soft robotics. During my undergraduate studies, I also had the opportunity to develop autonomous multi-modal locomotion robots under Professor Alireza Ramezani, and uncertainty-aware exoskeletons under Professor Max Shepherd.
Timeline
* Highlighted are ongoing positions
Selected Projects
* Highlighted are ongoing projects intended for future publication.
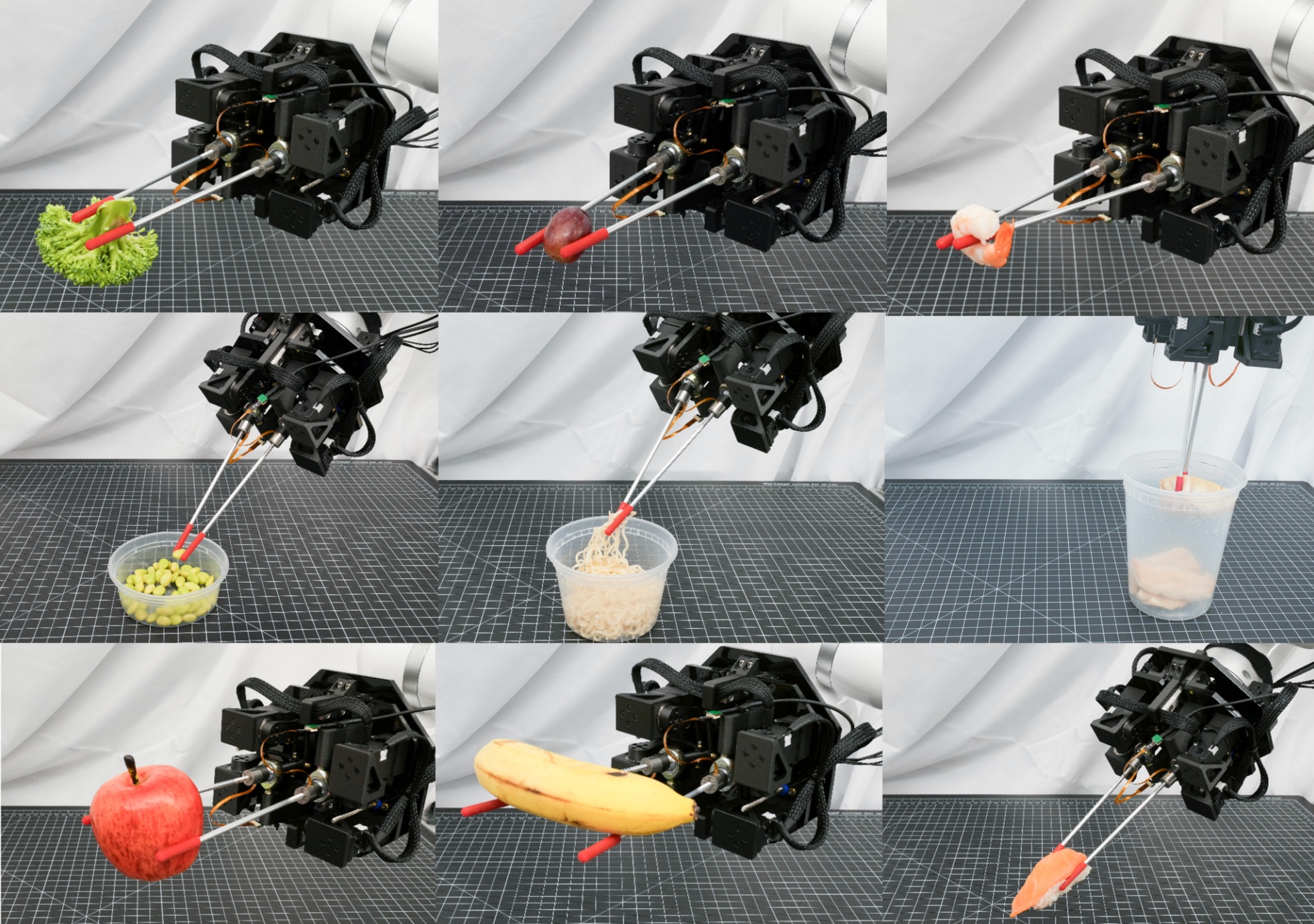
Image from A. Allison et al.

My early work in athletic training and at Stanford Sports Medicine Lab initially drew me toward biomechanics and pre-med. As I began working on assistive robotics in college, however, I found myself more captivated by solving the challenge of creating adaptive systems that work at and alongside human capability in open, real-world environments. I am especially interested in tackling this through robotic manipulation.
Blog
Powered by Jekyll and Minimal Light theme.